MIKROKONTROLER
PERBEDAAN MIKROKONTROLER DAN MIKROPROSESOR
Mikroprosesor
Mikroprosesor dalam perkembangan komputer digital disebut sebagai Central Processing Unit (CPU) yang bekerja sebagai pusat pengolah dan pengendalian pada sistem komputer mikro. Sebuah mikroprosesor tersusun dari tiga bagian penting yaitu : Arithmetic Logic Unit (ALU), Register Unit (RU), dan Control Unit (CU) seperti terlihat pada Gambar 1 di bawah ini.

Gambar. Blok Diagram Mikroprosesor
Untuk membangun fungsi sebagai komputer mikro, sebuah mikroprosesor harus dilengkapi dengan memori, biasanya memori program yang hanya bisa dibaca (Read Only Memory=ROM) dan memori yang bisa dibaca dan ditulisi (Read Write Memory=RWM), decoder memori, osilator, dan sejumlah peralatan input output seperti port data seri dan paralel.
Pokok dari penggunaan mikroprosesor adalah untuk mengambil data, membentuk kalkulasi, perhitungan atau manipulasi data, dan menyimpan hasil perhitungan pada peralatan penyimpan atau menampilkan hasilnya pada sebuah monitor atau cetak keras.
Mikrokontroler
Mikrokontroler adalah komputer mikro dalam satu chip tunggal. Mikrokontroler memadukan CPU, ROM, RWM, I/O paralel, I/O seri, counter-timer, dan rangkaian clock dalam satu chip tunggal seperti terlihat pada Gambar 2 di bawah ini.

Gambar. Blok Diagram Mikrokontroler
Sama halnya dengan mikroprosesor, mikrokontroler adalah piranti yang dirancang untuk kebutuhan umum. Penggunaan pokok dari mikrokontroler adalah untuk mengontrol kerja mesin atau sistem menggunakan program yang disimpan pada sebuah ROM. Untuk melihat perbedaan konsep diantara mikroprosesor dan mikrokontroler di bawah ini ditunjukan tabel perbandingan konfigurasi, arsitektur, dan set instruksi diantara mikroprosesor Z-80 CPU dengan mikrokontroler 8051.
BAGAN MIKROKONTROLER

JENIS-JENIS MIKROKONTROLER
1. AVR
Mikrokonktroler Alv and Vegard’s Risc processor atau sering disingkat AVR merupakan mikrokonktroler RISC 8 bit. Karena RISC inilah sebagian besar kode instruksinya dikemas dalam satu siklus clock. AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi.
Secara umum, AVR dapat dikelompokkan dalam 4 kelas. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
Fungsi pin mikrokontroler AVR. IC mikrokontroler dikemas (packaging) dalam bentuk yang berbeda. Namun pada dasarnya fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu bentuk IC seri mikrokontroler AVR ATmega8535 dapat dilihat berikut. Berikut adalah penjelasan fungsi tiap kaki.
1. Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2. Port B
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternatif khusus.
3. Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator untuk timer/counter 2.
4. Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif :
Ø E. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset. Ø F. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
Ø G. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier. Ø H. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
XTAL2 adalah output dari inverting oscillator amplifier. Ø H. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
Ø I. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
Ø J. AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
2. MCS-51
Mikrokonktroler ini termasuk dalam keluarga mikrokonktroler CISC. Sebagian besar instruksinya dieksekusi dalam 12 siklus clock. Mikrokontroler ini berdasarkan arsitektur Harvard dan meskipun awalnya dirancang untuk aplikasi mikrokontroler chip tunggal, sebuah mode perluasan telah mengizinkan sebuah ROM luar 64KB dan RAM luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah untuk akses program dan memori data.
Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM. Karena itulah MCS51 digunakan dalam rancangan awal PLC (programmable Logic Control).
IC mikrokontroler dikemas (packaging) dalam bentuk yang berbeda. Namun pada dasarnya. Fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu bentuk IC seri mikrokontroler MCS-51 dapat dilihat berikut.
Berikut adalah penjelasan fungsi tiap kaki yang biasa ada pada seri mikrokontroler MCS-51.
1. Port 0
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada desain yang
minimum (sederhana) digunakan sebagai port I/O (Input/Output). Pada desain lebih lanjut pada perancangan dengan memori eksternal digunakan sebagai data dan address yang di-multiplex. Port 0 terdapat pada pin 32-39. 2. Port 1
Merupakan port yang hanya berfungsi sebagai port I/O, kecuali pada IC 89S52 yang
menggunakan P1.0 dan P1.1 sebagai input eksternal untuk timer ketiga (T3). Port 1 terdapat pada pin 1-8. 3. Port 2
Merupakan dual-purpose port. Pada desain minimum digunakan sebagai port I/O. Pada desain lebih lanjut digunakan sebagai high byte dari address. Port 2 terdapat pada pin 21-28. 4. Port 3
Merupakan dual-purpose port. Selain sebagai port I/O juga mempunyai fungsi khusus.
3. PIC
Pada awalnya, PIC merupakan kependekan dari Programmable Interface Controller. Tetapi pada perkembangannya berubah menjadi Programmable Intelligent Computer. PIC termasuk keluarga mikrokonktroler berarsitektur Harvard yang dibuat oleh Microchip Technology. Awalnya dikembangkan oleh Divisi Mikroelektronik General Instruments dengan nama PIC1640. Sekarang Microhip telah mengumumkan pembuatan PIC-nya yang keenam.
Walaupun lebih sederhana dibandingkan dengan seri lainya di PIC tetapi mikrokontroler PIC 16F84 ini memiliki fitur-fitur yang tidak dimiliki oleh mikrokontroler keluaran Atmel atau Paralax.
Dari segi kecepatan lebih cepat MCS-51, dalam segi bahas pemrograman lebih mudah dan dapat dimengerti AVR, memory AVR lebih besar kapasitasnya daripada MCS-51,sedangkan untuk mikrokontroler PIC Walaupun lebih sederhana dibandingkan dengan seri lainya di PIC tetapi mikrokontroler PIC 16F84 ini memiliki fitur-fitur yang tidak dimiliki oleh mikrokontroler lain.
Apa itu MIKROKONTROLER
PENGERTIAN MIKROKONTROLER???
Merupakan bagian utama Basic Training Kit dimana bagian ini
merupakan konfigurasi minimum sistem Mikrokontroler untuk dapat digunakan.
Sebuah mikroprosesor yang digabungkan dengan input-output (I/O) dan memori
(Random Access Memory/Read Only Memory) akan membentuk sebuah system
mikrokomputer. Dari pemikiran CPU yang dapat dikonstruksi dalam sebuah IC
tunggal, maka sebuah mikroprosesor, I/O dan memori dapat pula dibangun dalam
tingkatan IC. Konstruksi ini menghasilkan Single Chip Microcomputer (SCM). SCM
inilah yang disebut mikrokontroler.
Tahun 1976 Intel meluncurkan Mikrokontroler pertama yang disebut seri MCS-48 yang berisi lebih dari 17.000 transistor, hingga saat ini seri ini masih banyak digunakan untuk aplikasi khusus. Seiring perkembangannya mikroprosesor, mikrokontroler juga mengalami perkembangan pesat seperti turunan MCS-51, 68HC11, mikrokontroler PIC, Fujitsu dan sebagainya.
Tahun 1976 Intel meluncurkan Mikrokontroler pertama yang disebut seri MCS-48 yang berisi lebih dari 17.000 transistor, hingga saat ini seri ini masih banyak digunakan untuk aplikasi khusus. Seiring perkembangannya mikroprosesor, mikrokontroler juga mengalami perkembangan pesat seperti turunan MCS-51, 68HC11, mikrokontroler PIC, Fujitsu dan sebagainya.
PERANAN MIKROKONTROLER??
1.
Pengendali
Motor dengan Remote Sony.
2.
Sensor
Warna TCS230.
3.
Jam Digital
dengan Bahasa C
4.
Pengamanan
Berdasarkan Pola Sidik Jari Yang Tersimpan Pada Kartu Pintar.
5.
Pengendali
Penerangan Ruangan Berbasis Mikrokontroler ATMEGA8535
6.
Sistem
Pengendalian Suhu Menggunakan AT89S51dengan Tampilan di PC
7.
Monitoring
Debit Air dan Alat Penggerak Pintu Air di Bendungan
8.
Sistem
keamanan ruangan menggunakan sensor passive infra red (PIR) KC7783R
dengan
Mikrokontroler
AT89S51
FUNGSI MINIMUM MIKROKONTROLER??
Sistem Minimum
Mikrokontroler adalah sebuah rangkaian paling sederhana dari sebuah
mikrokontroler agar IC mikrokontroler tersebut bisa beroperasi dan diprogram.
Dalam aplikasinya sistem minimum sering dihubungkan dengan rangkaian lain untuk
tujuan tertentu. Ada beberapa yang harus diperhatikan dalam membuat sistem
minimum mikrokontroler, yaitu:
Power Supply

Osilator
(Pembangkit Frekuensi)

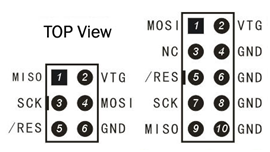
ISP (In-System
Programmable)
JENIS-JENIS MIKROKONTROLER???
1.
 AVR
AVR
 AVR
AVR
Mikrokonktroler
Alv and Vegard’s Risc processor atau sering disingkat AVR merupakan
mikrokonktroler RISC 8 bit. Karena RISC inilah sebagian besar kode instruksinya
dikemas dalam satu siklus clock. AVR adalah jenis mikrokontroler yang paling
sering dipakai dalam bidang elektronika dan instrumentasi.
Secara umum, AVR dapat dikelompokkan dalam 4 kelas. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
Secara umum, AVR dapat dikelompokkan dalam 4 kelas. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.
Fungsi pin mikrokontroler AVR. IC
mikrokontroler dikemas (packaging) dalam bentuk yang berbeda. Namun pada
dasarnya fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu bentuk
IC seri mikrokontroler AVR ATmega8535 dapat dilihat berikut. Berikut adalah
penjelasan fungsi tiap kaki.
1.
Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2. Port
B
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat
memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data
Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B
digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang
bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B
juga memiliki untuk fungsi-fungsi alternatif khusus.
3.
Port C
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat
memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data
Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C
digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang
bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua
pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator
untuk timer/counter 2.
4.
Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat
memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction
Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D
digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang
bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu,
pin-pin port D juga memiliki untuk fungsi-fungsi alternatif :
Ø
E. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
Ø
F. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
Ø
G. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier.
XTAL2 adalah output dari inverting oscillator amplifier.
Ø
H. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
Ø
I. AREF
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus dibeikan ke kaki ini.
Ø
J. AGND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlaog ground yang terpisah.
2. MCS-51

Mikrokonktroler
ini termasuk dalam keluarga mikrokonktroler CISC. Sebagian besar instruksinya
dieksekusi dalam 12 siklus clock. Mikrokontroler ini berdasarkan arsitektur
Harvard dan meskipun awalnya dirancang untuk aplikasi mikrokontroler chip
tunggal, sebuah mode perluasan telah mengizinkan sebuah ROM luar 64KB dan RAM
luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah untuk
akses program dan memori data.
Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM. Karena itulah MCS51 digunakan dalam rancangan awal PLC (programmable Logic Control).
Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM. Karena itulah MCS51 digunakan dalam rancangan awal PLC (programmable Logic Control).
IC
mikrokontroler dikemas (packaging) dalam bentuk yang berbeda. Namun pada
dasarnya. Fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu
bentuk IC seri mikrokontroler MCS-51 dapat dilihat berikut.
Berikut adalah penjelasan fungsi tiap kaki yang biasa ada pada seri mikrokontroler MCS-51.
Berikut adalah penjelasan fungsi tiap kaki yang biasa ada pada seri mikrokontroler MCS-51.
1.
Port 0
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada desain yang
minimum (sederhana) digunakan sebagai port I/O (Input/Output). Pada desain lebih lanjut pada perancangan dengan memori eksternal digunakan sebagai data dan address yang di-multiplex. Port 0 terdapat pada pin 32-39.
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada desain yang
minimum (sederhana) digunakan sebagai port I/O (Input/Output). Pada desain lebih lanjut pada perancangan dengan memori eksternal digunakan sebagai data dan address yang di-multiplex. Port 0 terdapat pada pin 32-39.
2.
Port 1
Merupakan port yang hanya berfungsi sebagai port I/O, kecuali pada IC 89S52 yang
menggunakan P1.0 dan P1.1 sebagai input eksternal untuk timer ketiga (T3). Port 1 terdapat pada pin 1-8.
Merupakan port yang hanya berfungsi sebagai port I/O, kecuali pada IC 89S52 yang
menggunakan P1.0 dan P1.1 sebagai input eksternal untuk timer ketiga (T3). Port 1 terdapat pada pin 1-8.
3.
Port 2
Merupakan dual-purpose port. Pada desain minimum digunakan sebagai port I/O. Pada desain lebih lanjut digunakan sebagai high byte dari address. Port 2 terdapat pada pin 21-28.
Merupakan dual-purpose port. Pada desain minimum digunakan sebagai port I/O. Pada desain lebih lanjut digunakan sebagai high byte dari address. Port 2 terdapat pada pin 21-28.
4.
Port 3
Merupakan dual-purpose port. Selain sebagai port I/O juga mempunyai fungsi khusus.
Merupakan dual-purpose port. Selain sebagai port I/O juga mempunyai fungsi khusus.
3.
 PIC
PIC
 PIC
PIC
Pada awalnya, PIC
merupakan kependekan dari Programmable Interface Controller. Tetapi pada
perkembangannya berubah menjadi Programmable Intelligent Computer. PIC termasuk
keluarga mikrokonktroler berarsitektur Harvard yang dibuat oleh Microchip
Technology. Awalnya dikembangkan oleh Divisi Mikroelektronik General
Instruments dengan nama PIC1640. Sekarang Microhip telah mengumumkan pembuatan
PIC-nya yang keenam.
Walaupun lebih
sederhana dibandingkan dengan seri lainya di PIC tetapi mikrokontroler PIC
16F84 ini memiliki fitur-fitur yang tidak dimiliki oleh mikrokontroler keluaran
Atmel atau Paralax.
4.
ARM

ARM adalah
prosesor dengan arsitektur set instruksi 32bit RISC (Reduced Instruction Set
Computer) yang dikembangkan oleh ARM Holdings. ARM merupakan singkatan dari
Advanced RISC Machine (sebelumnya lebih dikenal dengan kepanjangan Acorn RISC
Machine). Pada awalnya ARM prosesor dikembangkan untuk PC (Personal Computer)
oleh Acorn Computers, sebelum dominasi Intel x86 prosesor Microsoft di IBM PC
kompatibel menyebabkan Acorn Computers bangkrut.
Kesimpulan
dari 4 jenis mikrokontroler adalah :
Dari segi kecepatan lebih cepat MCS-51,
dalam segi bahas pemrograman lebih mudah dan dapat dimengerti AVR, memory AVR
lebih besar kapasitasnya daripada MCS-51,sedangkan untuk mikrokontroler PIC
Walaupun lebih sederhana dibandingkan dengan seri lainya di PIC tetapi
mikrokontroler PIC 16F84 ini memiliki fitur-fitur yang tidak dimiliki oleh
mikrokontroler lain
CLOCK PADA MIKROKONTROLER

Rangkaian Clock adalah jantung yang memberikan denyut-denyut nadi kehidupan bagi sebuah mikrokontroler. Tanpa clock, program dalam mikrokontroler yang memberinya arti dan fungsi, tidak akan dieksekusi. Tanpa clock, mikrokontroler praktis akan mati.
Clock untuk modul CPU dan RAM disebut CPU Clock. Clock untuk modul-modul I/O seperti Timer/Counter, USART, dan External Interrupt disebut I/O Clock. Sedangkan clock yang mengontrol operasi antarmuka Flash disebut Flash Clock. Flash Clock biasanya aktif berbarengan dengan CPU Clock.
PERANGKAT TAMBAHAN PADA MIKROKONTROLER
VOLATILE DAN NON VOLATILE

Memory Volatile
Memory volatile adalah memori yang datanya dapat ditulis atau dihapus, dan data akan hilang ketika tidak mendapat power / daya. Memory jenis ini hanya untuk penyimpanan data sementara saja, bukan untuk jangka waktu yang lama. Contoh dari memory volatile adalah RAM (Random Access Memory) digunakan sebagai memori utama untuk menyimpan program-program atau data-data yang sedang digunakan atau diperlukan oleh CPU saat dibutuhkan saja (sementara).
Memory Non-Volatile



Memory Non-Volatile adalah memory yang datanya dapat ditulis dan dihapus, akan tetapi datanya tidak hilang ketika tidak mendapat daya. Memory jenis ini banyak digunakan untuk menyimpan data dalam jangka waktu yang lama. Contoh memory non-volatile adalah Hardisk, Flashdisk, SD Card, dll. Hardisk pun ada 2 jenis, yaitu internal dan external.
HAL YANG PERLU DIPERHATIKAN PADA MEMORY
1. Merawat memory ( membersihkan dengan karet).
2. Melihat spesifikasi memory jika akan mau membeli.
3. Saat akan mengupgrade memory harus mengetahui cara mengupgrade memory yang benar.
4. Hindarkan memory dari air.
CONTOH ALAT YANG MEMAKAI MIKROKONTROLER
PENGENDALIAN PINTU GERBANG MENGGUNAKAN
MIKROKONTROLER AT89S8252
Secara garis besar, perancangan pintu gerbang dengan menggunakan password HP ini terdiri dari power supplay, mikrokontroler AT89S8252, driver motor stepper, motor stepper, display seven segmen, penguat, DTMF dekoder, dan saklar batas dan tombol manual. Diagram blok dari pintu gerbang dengan menggunakan password HP
ditunjukkan pada gambar berikut :

Ø Power supplay berfungsi sebagai sumber tegangan dari seluruh system agar system dapat bekerja.
Ø AT89S8252 merupakan pusat kendali dari seluruh rangkaian. Dimana mikrokontroler akan mengambil data yang dikirimkan oleh DTMF dekoder kemudian membandingkannya dengan nilai yang benardan juga mengecek sinyal yang dikirimkan oleh saklar batas, kemudian mengendalikan motor stepper.
Ø Driver motor stepper
berfungsi untuk mengendalikan perputaran dari motor stepper, sehingga
dengan demikian perputaran dari motor stepper yang berfungsi untuk
membuka/menutup pintu gerbang agar dapat dikendalikan oleh
mikrokontroler.
Ø Motor stepper berfungsi untuk mengendalikan proses membuka/menutup pintu gerbang.
Ø Saklar batas berfungsi untuk mengetahui apakah pintu gerbang telah terbuka lebar atau telah tertutup rapat.
Ø Tombol manual berfungsi untuk membuka/menutup pintu gerbang secara manual.
Ø Penguat berfungsi untuk menguatkan sinyal yang dikirimkan oleh HP.
Ø DTMF dekoder berfungsi untuk menterjemahkan sinyal DTMF
yang dikirimkan oleh HP menjadi 4 bit data biner agar dapat dikenali
oleh mikrokontroler.
Ø Display seven segmen berfungsi untuk menampilkan angka hasil terjemahan dari DTMF dekoder.
1.Perancangan Power Supplay (PSA)
Rangkaian PSA yang dibuat terdiri dari tiga keluaran, yaitu (+) 5 volt, (+) 12 volt dan (–) 12 volt. Keluaran (+) 5 volt digunakan untuk menghidupkan seluruh rangkaian, keluaran (+) 12 volt digunakan untuk menghidupkan relay dan keluaran (-) 12 volt untuk mensupplay tegangan negatip Op-Amp. Rangkaian tampak seperti gambar dibawah ini:
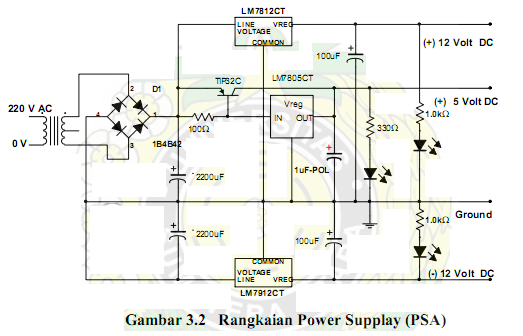
Trafo merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 15 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 15 volt DC akan diratakan oleh kapasitor 2200 µF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan (+) 12 volt DC langsung dihasilkan oleh regulator tegangan LM7812. Dan tegangan (-) 12 volt dihasilkan oleh regulator tegangan LM7912.
2. Perancangan Rangkain µC AT89S8252
Rangkaian µC AT89S8252 pada penelitian ini berfungsi sebagai pusat kendali dari seluruh sistem. Rangkaian mikrokontroler AT89S8252 ini akan menunggu pengiriman sinyal dari kedua saklar batas ketika sedang membuka/menutup pintu gerbang. Sinyal yang ditunggu adalah sinyal low. Jadi dalam keadaan normal, maka masing-masing saklar akan terus-menerus mengirimkan sinyal high. Ketika terjadi pengiriman sinyal low dari salah satu saklar, maka rangkaian mikrokontroler AT89S8252 ini akan melihat saklar mana yang mengirimkan sinyal low tersebut kemudian rangkaian mikrokontroler AT89S8252 memerintahkan motor untuk berhenti berputar. Rangkaian mikrokontroler AT89S8252 ditunjukkan oleh gambar 3.3 berikut :

1.Perancangan Power Supplay (PSA)
Rangkaian PSA yang dibuat terdiri dari tiga keluaran, yaitu (+) 5 volt, (+) 12 volt dan (–) 12 volt. Keluaran (+) 5 volt digunakan untuk menghidupkan seluruh rangkaian, keluaran (+) 12 volt digunakan untuk menghidupkan relay dan keluaran (-) 12 volt untuk mensupplay tegangan negatip Op-Amp. Rangkaian tampak seperti gambar dibawah ini:

Trafo merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 15 volt AC akan disearahkan dengan menggunakan dua buah dioda, selanjutnya 15 volt DC akan diratakan oleh kapasitor 2200 µF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan (+) 12 volt DC langsung dihasilkan oleh regulator tegangan LM7812. Dan tegangan (-) 12 volt dihasilkan oleh regulator tegangan LM7912.
2. Perancangan Rangkain µC AT89S8252
Rangkaian µC AT89S8252 pada penelitian ini berfungsi sebagai pusat kendali dari seluruh sistem. Rangkaian mikrokontroler AT89S8252 ini akan menunggu pengiriman sinyal dari kedua saklar batas ketika sedang membuka/menutup pintu gerbang. Sinyal yang ditunggu adalah sinyal low. Jadi dalam keadaan normal, maka masing-masing saklar akan terus-menerus mengirimkan sinyal high. Ketika terjadi pengiriman sinyal low dari salah satu saklar, maka rangkaian mikrokontroler AT89S8252 ini akan melihat saklar mana yang mengirimkan sinyal low tersebut kemudian rangkaian mikrokontroler AT89S8252 memerintahkan motor untuk berhenti berputar. Rangkaian mikrokontroler AT89S8252 ditunjukkan oleh gambar 3.3 berikut :

Selain mengecek sinyal yang dikirimkan oleh saklar batas, mikrokontroler
ini juga melihat data yang dikirimkan oleh DTMF dekoder dan
membandingkannya dengan data yang benar.
Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S8252. Kapasitor 10 µF dan resistor K ohm bekerja sebagai “ power on reset” bagi mikrokontroler AT89CS8252 dan kristal 12 MHZ bekerja sebagai penentu nilai clock kepada mikrokontroler, sementar kapasitor 30 µF bekerja sebagai resenator terhadap kristal.
Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED. Ini dilakukan hanya untuk menguji apakan rangkaian minimum mikrokontroller AT89S8252 sudah bekerja atau belum. Dengan memberikan program sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap digunakan. Namun setelah seluruh rangkaian disatukan, LED yang terhubung ke in 17 ini tidak digunakan lagi.
3. Perancangan Rangkaian Driver Motor Stepper
Untuk mengendalikan perputaran motor stepper dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S8252 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara
bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :

Rangkaian ini terdiri dari 4 buah transistor NPN TIP 122. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S8252. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktif dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
4. Perancangan Rangkaian Tombol Manual
Rangkaian tombol ini berfungsi untuk membuka atau menutup pintu gerbang secara manual. Rangkaian tombol manual ini hanya terdiri dari resistor dan tombol. Rangkaian tombol ditunjukkan pada gambar 3.8 berikut ini :
Komponen utama dari rangkaian ini adalah IC mikrokontroler AT89S8252. Kapasitor 10 µF dan resistor K ohm bekerja sebagai “ power on reset” bagi mikrokontroler AT89CS8252 dan kristal 12 MHZ bekerja sebagai penentu nilai clock kepada mikrokontroler, sementar kapasitor 30 µF bekerja sebagai resenator terhadap kristal.
Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED. Ini dilakukan hanya untuk menguji apakan rangkaian minimum mikrokontroller AT89S8252 sudah bekerja atau belum. Dengan memberikan program sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap digunakan. Namun setelah seluruh rangkaian disatukan, LED yang terhubung ke in 17 ini tidak digunakan lagi.
3. Perancangan Rangkaian Driver Motor Stepper
Untuk mengendalikan perputaran motor stepper dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor stepper searah dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran, dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S8252 dan keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika diberi sinyal high (1) secara
bergantian pada ke-4 masukannya. Rangkaiannya seperti gambar di bawah :

Rangkaian ini terdiri dari 4 buah transistor NPN TIP 122. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3 pada mikrokontroler AT89S8252. Basis dari masing-masing transistor diberi tahanan 10 Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122 mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktif dan tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan secara bergantian pada input dari driver motor stepper, maka motor stepper akan berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya, maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian dengan arah yang berlawanan dengan sebelumnya.
4. Perancangan Rangkaian Tombol Manual
Rangkaian tombol ini berfungsi untuk membuka atau menutup pintu gerbang secara manual. Rangkaian tombol manual ini hanya terdiri dari resistor dan tombol. Rangkaian tombol ditunjukkan pada gambar 3.8 berikut ini :

Jika tidak ada penekanan pada tombol, maka hubungan antara kaki mikrokontroler ke ground akan terputus ,sehingga rangkaian ini akan mengirimkan logika high (1) ke mikrokontroler AT89S8252. Namun jika ada penekanan pada tombol, maka kaki mikrokontroler akan terhubung dengan ground, sehingga rangkaian ini akan mengirimkan logika low (0) ke mikrokontroler AT89S8252. Perubahan dari logika high menjadi logika low inilah yang merupakan indikasi bahwa tombol ditekan.
5. Perancangan Rangkaian Saklar Batas
Ketika mikrokontroler memerintahkan motor untuk membuka pintu gerbang, Mikrokontroler tidak mengetahui apakah pintu gerbang sudah terbuka lebar atau belum. Hal yang sama juga terjadi ketika mikrokontroler memerintahkan motor untuk menutup pintu gerbang, mikrokontroler tidak mengetahui apakah pintu gerbang sudah tertutup rapat atau belum. Karena itu dibutuhkan sebuah saklar batas yang dapat mengetahui kedua keadaan tersebut.
Dalam hal ini digunakan sebuah saklar batas untuk buka pintu gerbang, yang berfungsi untuk mengetahui apakah pintu gerbang sudah terbuka lebar atau belum, dan sebuah saklar batas untuk tutup pintu gerbang yang berfungsi untuk mengetahui apakah pintu gerbang sudah tertutup rapat atau belum. Rangkaian saklar batas untuk buka pintu gerbang hanya terdiri dari saklar yang dihubungkan ke ground dan ke mikrokontroler AT89S8252. Rangkaiannya seperti gambar dibawah ini,
Ketika mikrokontroler memerintahkan motor untuk membuka pintu gerbang, Mikrokontroler tidak mengetahui apakah pintu gerbang sudah terbuka lebar atau belum. Hal yang sama juga terjadi ketika mikrokontroler memerintahkan motor untuk menutup pintu gerbang, mikrokontroler tidak mengetahui apakah pintu gerbang sudah tertutup rapat atau belum. Karena itu dibutuhkan sebuah saklar batas yang dapat mengetahui kedua keadaan tersebut.
Dalam hal ini digunakan sebuah saklar batas untuk buka pintu gerbang, yang berfungsi untuk mengetahui apakah pintu gerbang sudah terbuka lebar atau belum, dan sebuah saklar batas untuk tutup pintu gerbang yang berfungsi untuk mengetahui apakah pintu gerbang sudah tertutup rapat atau belum. Rangkaian saklar batas untuk buka pintu gerbang hanya terdiri dari saklar yang dihubungkan ke ground dan ke mikrokontroler AT89S8252. Rangkaiannya seperti gambar dibawah ini,

Ketika saklar batas dalam keadaan terbuka, kondisi P1.0 adalah high. Namun jika pintu gerbang menyentuh saklar, maka P1.0 akan terhubung ke ground, yang menyebabkan kondisi P1.0 akan berubah dari high (1), menjadi low (0). Perubahan kondisi pada P1.0 inilah yang dikenali oleh mikrokontroler sebagai tanda bahwa pintu gerbang telah terbuka lebar, maka mikrokontroler akan memerintahkan motor stepper untuk berhenti berputar, sehingga pintu gerbang tidak terbuka lebih lebar lagi.
Saklar batas untuk tutup pintu gerbang juga mempunyai rangkaian dan cara kerja yang sama dengan rangkaian saklar batas untuk buka pintu, perbedaannya hanya terletak pada hubungannya dengan
mikrokontroler AT89S8252.
6. Perancangan Rangkaian Penguat
Rangkaian penguat ini berfungsi untuk menguatkan sinyal yang diterima oleh HP (kabel speaker pada hansfree). Karena sinyal yang diterima oleh HP sangat kecil, sehingga dibutuhkan penguat. Rangkaian penguat dapat dilihat pada gambar berikut ini :

Komponen utama dari rangkaian ini adalah Op Amp 741, yang merupakan ICpenguat. Pada rangkaian ini terjadi penguatan sebesar :

7. Perancangan Rangkaian DTMF Dekoder
Rangkaian ini berfungsi untuk mengubah nada tone yang diterima menjadi 4 bit data biner. Rangkaian DTMF decoder datunjukkan oleh gambar 3.8 berikut :

Komponen utama dari rangkaian ini adalah IC HT9170. IC ini merupakan IC DTMF decoder. IC ini akan merubah tone yang ada pada inputnya menjadi 4 bit data biner. Jika tone yang diterimanya tone 1, maka output dari rangkaian ini adalah 0001, tone yang diterimanya tone 2, maka output dari rangkaian ini adalah 0010, demikian seterusnya.
Input rangkaian akan dihubungkan dengan penguat sehingga sinyal (tone) yang berasal dari HP akan diinputkan ke pin 2 dari IC. Output dari rangkaian akan dihubungkan ke mikrokontroler sehingga mikrokontroler dapat mengenali data yang dikirimkan oleh rangkaian untuk kemudian diolah oleh mikrokontroler untuk melaksanakan instruksi selanjutnya.
8. Perancangan Rangkaian Buzzer
Rangkaian buzzer ini berfungsi untuk memberitahukan kepada pemilik,
ketika terjadi kesalahan memasukkan password. Rangkaiannya seperti
gambar di bawah ini:

Pada alat ini, alarm yang digunakan adalah buzzer 5 volt. Buzzer ini akan berbunyi jika positipnya dihubungkan ke sumber tegangan positip dan negatipnya negatipnya dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang dapat menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatif buzzer dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan buzzer berbunyi. Sebaliknya jika transistor
tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 5 volt, keadaan ini menyebabkan buzzer mati. Transistor yang digunakan dalam rangkaian pada gambar 3.9 adalah transistor jenis NPN, transistor jenis ini akan aktif apabila tegangan pada basis lebih besar dari 0,7 volt. Resistor 4,7 K pada basis berguna untuk membatasi arus yang masuk pada basis agar transistor tidak rusak

Pada alat ini, alarm yang digunakan adalah buzzer 5 volt. Buzzer ini akan berbunyi jika positipnya dihubungkan ke sumber tegangan positip dan negatipnya negatipnya dihubungkan ke ground.
Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang dapat menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatif buzzer dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan buzzer berbunyi. Sebaliknya jika transistor
tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 5 volt, keadaan ini menyebabkan buzzer mati. Transistor yang digunakan dalam rangkaian pada gambar 3.9 adalah transistor jenis NPN, transistor jenis ini akan aktif apabila tegangan pada basis lebih besar dari 0,7 volt. Resistor 4,7 K pada basis berguna untuk membatasi arus yang masuk pada basis agar transistor tidak rusak
9. FLOWCHART

Program diawali dengan start yang berarti rangkaian dihidupkan, kemudian program akan menunggu penekanan pada tombol, jika tidak ada penekanan pada tombol, maka program akan menunggu sinyal DTMF yang datang. Jika tidak ada maka, program akan kembali menunggu penekanan tombol. Jika terjadi penekanan tombol, maka program akan memerintahkan motor untuk berputar membuka pintu gerbang, kemudian program akan menunggu sejenak, sampai kendaraan masuk ke dalam gerbang. Selanjutnya program akan memerintahkan motor untuk berputar menutup gerbang, kemudian kembali ke rutin awal untuk menunggu penekanan tombol dan sinyal DTMF berikutnya.
Jika ada sinyal DTMF yang datang, yang berarti ada orang yang menghubungi. Handphone yang ada pada alat penerima, maka program akan mengambil nilai password yang dimasukkan. Jika nilainya salah, maka program akan kembali ke rutin awal untuk menunggu penekanan tombol dan menunggu sinyal DTMF berikutnya.
Jika password yang diberikan benar, maka progran akan memerintahkan motor untuk berputar membuka pintu gerbang, kemudian program akan menunggu sejenak, sampai kendaraan masuk melewati gerbang. Selanjutnya program akan memerintahkan motor untuk berputar menutup gerbang, kemudian kembali ke rutin awal untuk menunggu penekanan tombol dan sinyal DTMF berikutnya.
THE CLAPPER
The Clapper yang menggunakan sensor suara tepukan tangan untuk
menyalakan atau mematikan peralatan elektronik yang ada seperti lampu
dan televisi.Prinsip kerja dari “The Clapper” sendiri adalah dengan menggunakan sensor suara tepukan tangan user (clap) yang nantinya suara tersebut akan masuk melalui mic yang tertanam pada perangkat tersebut yang nantinya akan diolah oleh microcontroller yang sudah terprogram dan menerjemahkannya sebagai instruksi untuk memutus atau menghubungkan arus listrik pada perangkat elektronik tertentu.
Misalnya dengan satu kali tepukan untuk menyalakan atau mematikan lampu, dua kali tepukan untuk menyalakan atau mematikan televisi, tiga kali tepukan untuk menyalakan atau mematikan AC.
Proses kerja “The Clapper”:
1. Inputan berupa suara tepukan masuk melalui mic.
2. Inputan di saring apakah suara tersebut berada pada range antara 2200 hingga 2800 hertz.
Bila suara yang masuk tidak berada pada rentang frekuensi tersebut, maka sistem akan
mengabaikannya.
3. Setiap suara tepukan yang masuk, akan dikirimkan berupa sinyal kepada sistem yang akan
diteruskan menuju trigger elektronik yang terpasang pada perangkat-perangkat elektronik.
4. Suara satu kali tepukan yang terregister, akan menyalakan sebuah perangkat elektronik, dan untuk mematikannya, tinggal lakukan hal yang sama
Pada dasarnya, “The Clapper” hanya menggunakan suara dengan rentangan frekuensi tertentu sebagai trigger atau saklar untuk menyalakan dan mematikan perangkat elektronik.
Pengendali Penerangan Ruangan Berbasis Mikrokontroler ATMEGA8535
Sebagai pengendali utama pada sistem menggunakan miktokontroller ATmega8535 dengan input dari sensor cahaya (LDR). Output dari pendendali selanjutnya ditampilkan LCD M1632 sebagai penampil dan sebagai input rangkaian pengatur tegangan. Sistem ini bekerja di dalam ruangan (in door) menggunakan maket rumah dengan tiga ruangan sebagai model. Dalam pengujian perangkat keras dan lunak, diketahui bahwa system pengendalian penerangan ruangan ini dapat menghemat energi. Dari pengujian sensor cahaya diperoleh hubungan antara luminansi dan tegangan yang mendekati linier, sehingga pengendalian dengan mikrokontroler ATmega8535 dapat bekerja dengan baik.
Pengamanan Berdasarkan Pola Sidik Jari Yang Tersimpan Pada Kartu Pintar.
MikrokontrolerDT51 MinSys menjadikan suatu basis yang dapat berdiri sendiri dan sangat diminati serta banyak manfaat yang berguna bagi para pecinta perangkat keras yang berbasiskan pemprograman bahasa mesin yang menunjang sistem keamanan tersebut. Perangkat ini dapat bekerja secara normal (online) dengan keadaan mikrokontroler DT51 MinSys dan komputer beserta program bekerja dengan baik, namun dapat juga bekerja walaupun dalam keadaan listrik padam atau disebut juga bekerja secara mandiri (offline), karena disediakannya suplai tegangan yang berasal dari catu daya dan juga ada sumber tegangan yang lain berasal dari bateri yang dapat diisi ulang dan berkesinambungan. Papan tekan yang dikendalikan oleh mikrokontroler DT51 MinSys digunakan sebagai alat masukan yang berbentuk kode. Liquid Crystal Display (LCD) dijadikan sebagai penampil dari aktifitas kegiatan sistem pengamanan tersebut. Dalam penggunaan sistem pengamanan yang berbasiskan mikrokontroler DT51 MinSys ini hanya pengguna yang mengetahui kode akses dan memiliki kartu pintar serta pola sidik jari yang telah tersimpan didalam kartu pintar yang berhak masuk kedalam sistem pengamanan yang berbasiskan pola sidik jari. Percobaan yang dilakukan bertujuan untuk mengetahui kestabilan, kecepatan, kompatibilitas, info program, tingkat keamanan yang tinggi serta menunjukkan hasil yang baik.
Sumber :
https://ilham0191.wordpress.com/2011/04/30/jenis-jenis-ram-dan-rom/
http://1.bp.blogspot.com/rWyupPkgNQw/UnOiv85iVmI/AAAAAAAAAV0/ENAy22SgcFM/s1600/6.jpg
http://www.immersa-lab.com/perbedaan-mikrokontroler-dan-mikroprosesor.htm
https://telinks.wordpress.com/2009/01/16/avr-rangkaian-clock/
http://prayudasmkn5.blogspot.com/2014/04/pengertian-memory-volatile-dan-non.html